Caltech’s LEONARDO is a Birdlike Robot That Floats on Two Legs
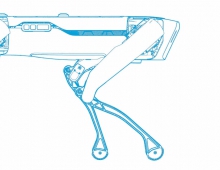
Researchers at the university of Caltech have debuted a machine called LEONARDO (LEg ON Aerial Robotic DrOne), which walks on two legs but also uses thrusters attached to its torso to achieve a kind of hover-walk.
LEONARDO is a bipedal robot that uses synchronized control of drone-like propellers and legged joints.
This robot is under development at the Center for Autonomous Systems and Technologies (CAST).
The core research team includes Prof. Mory Gharib, Prof. Soon-Jo Chung, Dr. Kyunam Kim, Patrick Spieler, and Caltech SURF students Yasmin Veys, Saskia van Nieuwstadt, and Brian Cruz.
LEONARDO could help load injured humans into drone ambulances, or even explore the surface of Mars. However, it is still under testing, so don't expect to see it scrambling up mountains anytime soon.
The "robot" stands at two and a half feet and weighs in just six pounds, thanks to its lightweight carbon fiber construction. It can walk around on lanky legs, but unlike a traditional robot it can use its thrusters as a failsafe.
“You can take a couple of steps to avoid falling, but what if that fails?” asks Northeastern University roboticist Alireza Ramezani, designer and developer of Leo. “The thrusters in this scenario can make the system almost fault tolerant.” They offer a backup plan in case of trouble, allowing the robot to switch seamlessly between legs and thrusters depending on what’s most useful in the moment.
It typically takes a lot of energy just to get a two-legged robot to balance in place—even when it’s standing still, provided that a bipedal robot has to constantly make corrections. The promise of LEONARDO is that it’ll be more efficient at this kind of idling. Instead of wobbling to correct itself, the biped can switch on the thrusters to become a drone on legs: The propellers won’t have to waste energy lifting the robot, per se, because the feet will still be in contact with the ground.
LEONARDO has also the advantage of floating over a difficult terrain, making missteps less likely to be catastrophic.
The scientists are exploring how a robot like Leo might navigate the rough Martian landscape more efficiently than a traditional helicopter by putting its feet on the ground and lightly powering up the thrusters.